Enviado por
|
El autómata de dos patas del equipo de investigación, un innovador diseño bípedo, se basa en el legado de los androides biohíbridos que aprovechan los músculos. Los tejidos musculares los han impulsado a gatear, nadar hacia adelante y hacer giros, pero no bruscos.
Sin embargo, poder girar y realizar rotaciones bruscas es una característica esencial para que los robots eviten obstáculos. Para construir un autómata más ágil con movimientos finos y delicados, los investigadores diseñaron un androide biohíbrido que imita la marcha humana y opera en el agua.
El robot tiene una parte superior de boya de espuma y patas con peso para ayudarlo a mantenerse erguido bajo el agua. El esqueleto del robot está hecho principalmente de caucho de silicona que puede doblarse y flexionarse para adaptarse a los movimientos de los músculos.
Luego, los investigadores colocaron tiras de tejido de músculo esquelético cultivado en laboratorio en la goma de silicona y en cada pierna. Cuando los investigadores aplicaron electricidad al tejido muscular, el músculo se contrajo y levantó la pierna. Luego, el talón de la pierna aterrizó hacia adelante cuando la electricidad se disipó.
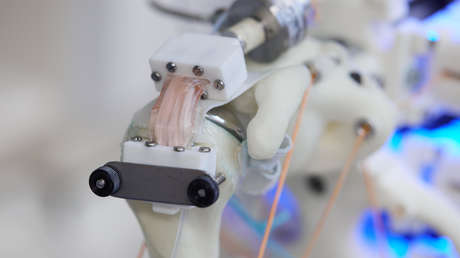
Para girar, los investigadores golpearon repetidamente la pierna derecha cada 5 segundos mientras la izquierda servía como ancla. El robot giró 90 grados a la izquierda en 62 segundos.
Los hallazgos mostraron que el robot bípedo impulsado por músculos puede caminar, detenerse y realizar movimientos de giro afinados. Actualmente, los científicos deben mover manualmente un par de electrodos para aplicar un campo eléctrico individualmente a las piernas, lo que lleva tiempo.
/sdmedia.playser.cadenaser.com/playser/20241/26/1706260869121_1706260869_video_1706260938.jpg)
Pero antes de actualizar el robot con más componentes biológicos, el equipo tendrá que integrar un sistema de suministro de nutrientes para sostener los tejidos vivos y las estructuras de los dispositivos que permiten al robot operar en el aire.
No hay comentarios:
Publicar un comentario